
Binder Phases
本文主要讲述 Binder 流程中的各个阶段,起到一个 Overview 的目的。
Phases Overview
我们想对 binder 做性能优化(这块部分如果后续较为完善的话可以考虑独立出去),可以从几个 phase 进行分解:
- 🐇🐇 phase 1: app to BpBinder: 从 app 到 Binder 客户端。
- phase 2: BpBinder to driver
- phase 3: driver send logic
- 🐇🐇 phase 4: driver to BBinder
- 🐇🐇 phase 5: BBinder to server
- phase 6: server logic
- phase 7: server back BBinder
- phase 8: BBinder back driver
- phase 9: driver reply logic
- phase 10: driver back BpBinder
- phase 11: BpBinder back app
为方便理解,我们引用下面的图来进行参考说明。
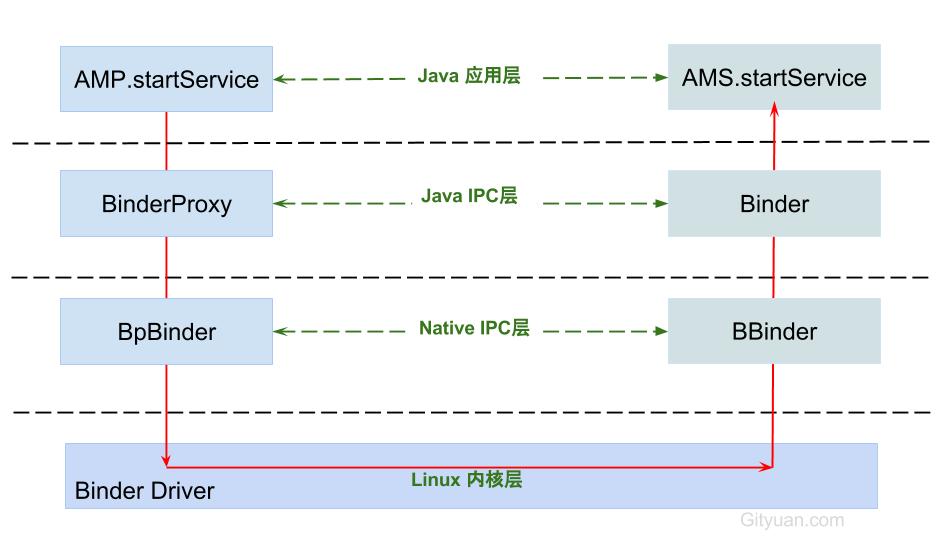
Phase 1
App to BpBinder, 图中的 AMP clinet 到 BpBinder 的过程,这个过程主要发生了以下事情:
在 APP 侧,调用 startService(), 在调用该函数之间,会调用到其他的逻辑,我们分别给出一个 OHOS 的示例和 Android 的示例。
OHOS
列举了两种方式:期约和回调函数。
import rpc from "@ohos.rpc"
// 使用期约
let option = new rpc.MessageOption()
let data = rpc.MessageParcel.create()
let reply = rpc.MessageParcel.create()
// 往 data 里写入参数
proxy.sendRequest(1, data, reply, option)
.then(function (result) {
if (result.errCode != 0) {
console.error("send request failed, errCode: " + result.errCode)
return
}
// 从result.reply里读取结果
})
.catch(function (e) {
console.error("send request got exception: " + e);
})
.finally(() => {
data.reclaim()
reply.reclaim()
})使用期约的情况下,客户端完成了几件事情。首先是往 Parcel 对象中写入参数,而后是调用 proxy 的 sendRequest 方法,得到服务端的回复后进行处理。
我们所说的 App to BpBinder 的过程就是:客户端数据封装 –> 调用 BpBinder(在 OHOS 中称作 Proxy) 提供的方法。
// 使用回调函数
function sendRequestCallback(result) {
try {
if (result.errCode != 0) {
console.error("send request failed, errCode: " + result.errCode)
return
}
// 从 result.reply 里读取结果
} finally {
result.data.reclaim()
result.reply.reclaim()
}
}
let option = new rpc.MessageOption()
let data = rpc.MessageParcel.create()
let reply = rpc.MessageParcel.create()
// 往 data 里写入参数
proxy.sendRequest(1, data, reply, option, sendRequestCallback)使用回调函数的过程较为简单,直接是封装数据 –> 发送请求(在我们 phase 1 的过程中)
Android
public ComponentName startService(IApplicationThread caller,
Intent service, String resolvedType,
String callingPackage, int userId)
throws RemoteException {
// 获取或创建 Parcel 对象
Parcel data = Parcel.obtain();
Parcel reply = Parcel.obtain();
data.writeInterfaceToken(IActivityManager.descriptor);
data.writeStrongBinder(caller != null ? caller.asBinder() : null);
service.writeToParcel(data, 0);
// 写入 Parcel 数据
data.writeString(resolvedType);
data.writeString(callingPackage);
data.writeInt(userId);
// 通过 Binder 传递数据
mRemote.transact(START_SERVICE_TRANSACTION, data, reply, 0);
// 读取应答消息的异常情况
reply.readException();
// 根据 reply 数据来创建 ComponentName 对象
ComponentName res = ComponentName.readFromParcel(reply);
data.recycle();
reply.recycle();
return res;
}和 JS 的过程基本上一致,挑选其中一些细节进行说明:
➡️➡️ Parcel.obtain() 完成了什么事情?从缓存池中获取一个 Parcel 对象。
public static Parcel obtain() {
// sOwnedPool 为 Parcel 对象的缓存池
final Parcel[] pool = sOwnedPool;
synchronized (pool) {
Parcel p;
// POOL_SIZE = 6
for (int i=0; i<POOL_SIZE; i++) {
p = pool[i];
if (p != null) {
pool[i] = null;
return p;
}
}
}
//当缓存池没有现成的 Parcel 对象,则直接创建
return new Parcel(0);
}关于 Parcel 对象的创建,我们留到 Pracel 章节进行详细说明。
Phase 1 Summary
🩸🩸 从上面上个场景的代码分析我们可以看出来,主要的操作耗时还是在 Pracel 过程中。在后续的研究中,我们可以看到 Pracel 对象的创建和 native world 也是息息相关的,所以这一个 phase 是存在一些优化的空间在的。
Phase 2
BpBinder to driver, 这个过程主要是从客户端 native 到 driver 的过程。
OHOS
从上文我们了解到,客户端会调用 proxy 的 sendRequest 方法,对应的实现如下:
Android
从上文我们了解到,客户端调用到 native 是通过 mRemote.transact 来实现的,该方法的实现如下:
final class BinderProxy implements IBinder {
public boolean transact(int code, Parcel data, Parcel reply, int flags)
throws RemoteException {
//用于检测 Parcel 大小是否大于 800k
Binder.checkParcel(this, code, data, "Unreasonably large binder buffer");
// 调用 native
return transactNative(code, data, reply, flags);
}
}这个方法的功能非常简单,主要完成对 native 方法 transactNative 的调用。
transactNative 参数
mRemote.transact() 方法中的
- code: START_SERVICE_TRANSACTION,
- data 保存
descriptor,caller,intent,resolvedType,callingPackage,userId这 6 项信息。
transactNative 方法对应的 native 函数为 android_os_BinderProxy_transact.
android_util_Binder.cpp
static jboolean android_os_BinderProxy_transact(JNIEnv* env, jobject obj,
jint code, jobject dataObj, jobject replyObj, jint flags)
{
...
//将 java Parcel 转为 C++ Parcel
Parcel* data = parcelForJavaObject(env, dataObj);
Parcel* reply = parcelForJavaObject(env, replyObj);
//gBinderProxyOffsets.mObject 中保存的是 new BpBinder(handle) 对象
IBinder* target = (IBinder*) env->GetLongField(obj, gBinderProxyOffsets.mObject);
...
//此处便是 BpBinder::transact()
status_t err = target->transact(code, *data, reply, flags);
...
//最后根据 transact 执行具体情况,抛出相应的 Exception
signalExceptionForError(env, obj, err, true , data->dataSize());
return JNI_FALSE;
}抛开无关细节,主要是调用 target->transact 方法,target 是一个 BpBinder 对象:
BpBinder.cpp
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}上述函数采取了单例模式,确保每个线程只有一个实例对象。主要还是调用到 IPCThreadState::transact 方法:
IPCThreadState.cpp
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck(); // 数据错误检查
flags |= TF_ACCEPT_FDS;
....
if (err == NO_ERROR) {
// 传输数据
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
if (err != NO_ERROR) {
if (reply) reply->setError(err);
return (mLastError = err);
}
// 默认情况下,都是采用非 oneway 的方式, 也就是需要等待服务端的返回结果、同步
if ((flags & TF_ONE_WAY) == 0) {
if (reply) {
// reply 对象不为空
err = waitForResponse(reply);
}else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
} else {
err = waitForResponse(NULL, NULL);
}
return err;
}通常情况下会走同步模式,也就是 oneway。两个模式都会调用到 waitForResponse 函数。
在看 waitForResponse 函数之间,我们先简单说明一下 transact 的主要过程:
首先、执行 writeTransactionData(第 10 行)向 mOut 写入数据,此时 mIn 还没有数据;
然后执行 waitForResponse 方法,该方法循环执行,直到收到应答消息,此间调用 talkWithDriver 和驱动交互,收到应答消息后写入 mIn, 根据响应码分类操作。
如果我们不再往下研究的话,此时客户端视角下的通信已经完成了,而我们的 phase 2 就是到此为止。
writeTransactionData 的实现大致如下:
IPCThreadState.cpp
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.ptr = 0;
tr.target.handle = handle; // handle 指向 AMS
tr.code = code; // START_SERVICE_TRANSACTION
tr.flags = binderFlags; // 0
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
// data 为 startService 相关信息
tr.data_size = data.ipcDataSize(); // mDataSize
tr.data.ptr.buffer = data.ipcData(); // mData 指针
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t); // mObjectsSize
tr.data.ptr.offsets = data.ipcObjects(); // mObjects 指针
}
...
mOut.writeInt32(cmd); // cmd = BC_TRANSACTION
mOut.write(&tr, sizeof(tr)); // 写入 binder_transaction_data数据
return NO_ERROR;
}23-24 行将数据写入了 mOut, 写入的类型是 binder_transaction_data 类型。
waitForResponse 的实现大概如下:
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
err = mIn.errorCheck();
if (err < NO_ERROR) break; //当存在 error 则退出循环
//每当跟 Driver 交互一次,若 mIn 收到数据则往下执行一次 BR 命令
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32();
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
//只有当不需要 reply, 也就是 oneway 时才会跳出循环,否则还需要等待.
if (!reply && !acquireResult) goto finish; break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT; goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION; goto finish;
case BR_REPLY: ... goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (reply) reply->setError(err); // 将发送的错误代码返回给最初的调用者
}
return err;
}这里面又引入了关键的操作:talkWithDriver 和 executeCommand;
这两者的功能是:执行 binder 读写操作,也就是 BINDER_WRITE_READ, 会经过 syscall, 进入 Binder 驱动,调用驱动中的 binder_ioctl 函数。在 default 的情况下,会调用后者;其他情况下是在 talkWithDriver 对 executeCommand 进行调用。
OK,Phase 2 到此为止。
Phase 2 Summary
总结一下,BpBinder 到 Binder Driver 做了什么事情?
首先,我们找到 native 层的方法,